
센서퓨전 세팅하기
RV(Reference viewer) 이미지를 업로드하고 세팅하세요.
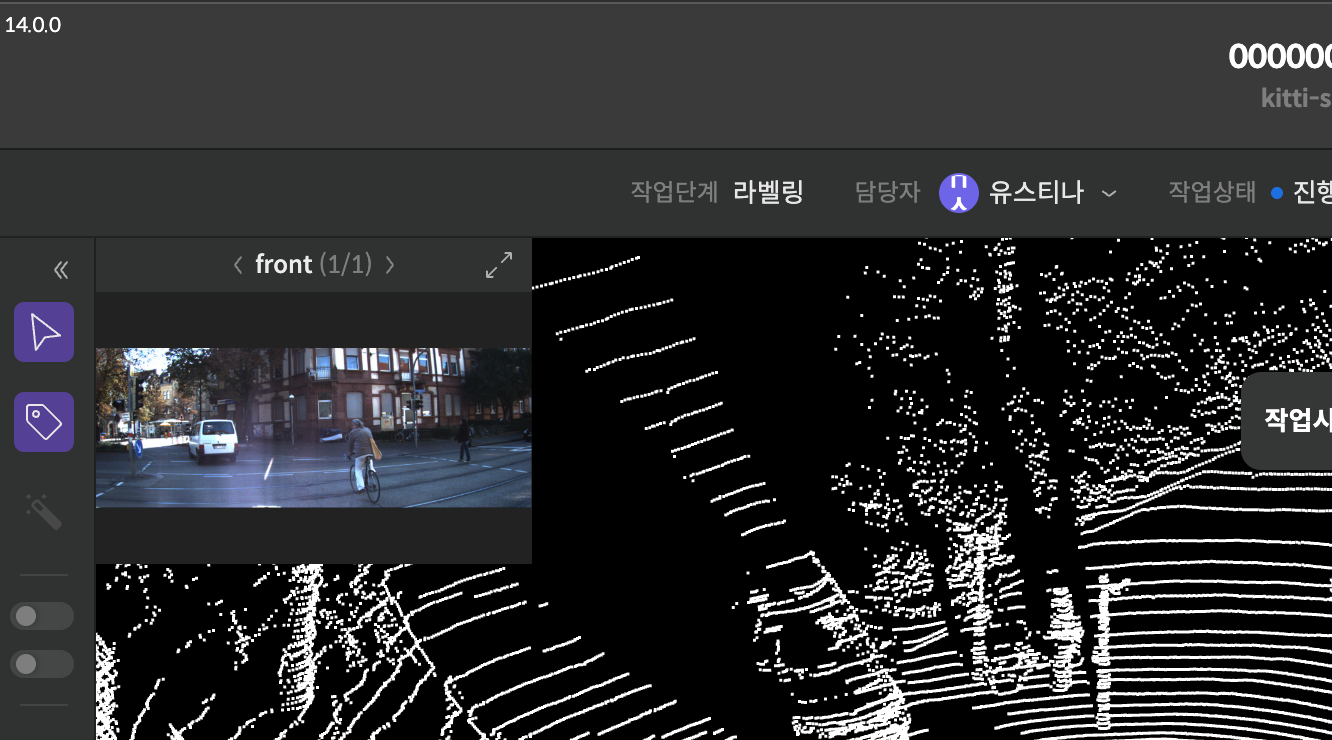
센서퓨전(Sensor Fusion)이란?
LiDAR 3D Cuboid 작업유형으로, 라벨링 작업을 진행할 때 동시간 대 촬영된 카메라 이미지를 함께 확인할 수 있는 센서퓨전 기능을 제공합니다. 이때 보여지는 카메라 이미지 뷰어를 RV(Reference Viewer)라 표현합니다.
LiDAR센서와 RV이미지를 촬영하는 카메라는 동일한 위치에서 정보를 수집하지 않으므로 이에 대한 위치와 화각을 조정하는 과정이 필요합니다. 이 오차를 일치시키는 설정값을 'Calibration'값이라 표현합니다.
- 센서퓨전 기능을 활용하기 위해서는 기존 3D Cuboid 작업 파일에 RV이미지와 Calibration 값(또는 파일)을 추가적으로 업로드하여야 합니다.
센서퓨전 폴더 구조
RV 이미지, RV 이미지에 대한 GT 데이터, 씬 Calibration 데이터는 별도의 폴더구조로 구성되어야 합니다.
- __RV__{title} : 작업 대상에 대한 레퍼런스 이미지
- __GT__{title} : 레퍼런스 이미지에 대한 GT 데이터
- __META__ : 씬 캘리브레이션 정보로 매핑될 데이터
- __META__{title} : 프레임 캘리브레이션 정보로 매핑될 데이터
- title에 들어갈 수 있는 항목
- front
- rear
- right
- left
- front_right
- front_left
- rear_right
- rear_left
- left_front
- left_rear
- right_front
- right_rear
- 작업 파일(bin)에 매칭될 RV, GT, META파일은 bin 파일명과 동일해야 합니다.
- RV 이미지는 3D Cuboid 작업파일(bin)과 함께 동시에 업로드되어야 적용됩니다.
- RV 이미지 확장자는 jpg, png를 지원합니다.
1. __RV__{title}
- 작업 대상(프레임)에 대한 레퍼런스 이미지
- 예:
/scene/__RV__front/a.png- 같은 폴더 내에서 확장자는 동일해야 함
2. __GT__{title}
- 레퍼런스 이미지에 대한 GT 데이터
- 예:
/scene/__GT__front/a.json - GT는 에이모 GT 포맷으로 제한
- 필수 항목: filename, parent_path, annotations, attributes
- 다른 항목 포함되어있을 경우 무시, 형식에 맞지 않을 경우 조회되지 않음
- annotation type은 bbox, polygon, polysegmentation 유형만 조회
- filename, parent_path로 매핑 대상 파일을 찾는 것은 아니기 때문에, 업로드한 폴더 구조만 맞으면 매핑에는 문제 없으나 크로스 체크를 위해 추가
- 필수 항목: filename, parent_path, annotations, attributes
- json 파일 예시
- parent_path, filename 은 매핑될 레퍼런스 이미지 정보 기준
{ "parent_path": "/scene/__RV__front", "filename": "a.png", "annotations": [], "attributes": {} }
3. __META__
- 씬 캘리브레이션 정보로 매핑될 데이터
- 파일 명은 레퍼런스 뷰 이름으로 저장
- 예:
/test/__META__/front.json - json 파일 예시
{ "rv_type" : "front", "rotations": [0.032833,0.083,-0.009749], "translations": [0.65757,-0.2875,-0.546727], "intrinsic_camera_parameters": [2636.504955,2607.765140,1449.383497,945.305018,-0.355957,0.152205,-0.001168,0.002894], "camera_mode_type": "pinhole", "type": "type_m" }
메타 데이터 파일 포맷
Name | Type | Required or not | A note |
|---|---|---|---|
rotations | Listck:para | O | 배열의 길이 3으로 고정 |
translations | Listck:para | O | 배열의 길이 3으로 고정 |
intrinsic_camera_parameters | Listck:para | O | 배열의 길이 8으로 고정 |
camera_mode_type | String | X | pinhole, fisheye 중 택 1 |
type | String | X | Standard, type_m, remote 중 택 1 |
4. __META__{title}
- 프레임 캘리브레이션 정보로 매핑될 데이터
- 파일 명은 매핑될 프레임명으로 저장.
- test.bin ↔ test.json
- 예:
/scene/__META__front/a.json
센서퓨전 활성화하기

센서퓨전 활성화
라벨링 설정 메뉴의 스튜디오 설정 탭으로 이동하여 센서퓨전 활성화를 선택하면 센서퓨전 기능이 활성화됩니다.
캘리브레이션 공통 설정
프로젝트 내 모든 씬파일에 공통으로 적용되는 캘리브레이션 값을 설정합니다. 씬파일 또는 프레임 별 캘리브레이션 값이 업로드된다면 공통 캘리브레이션 값보다 우선 적용됩니다.
캘리브레이션 공통 설정 시
remoteUrl을 카메라 종류에 따라 아래와 같이 입력해야 합니다.
- Lidar To Cam, Cuboid, Pinhole 카메라
remoteUrl: https://saas-dp-api.bluewhale.team/sensor-fusion/lidar-to-camera/cuboid/pinhole - Lidar To Cam, Cuboid, Fisheye 카메라
remoteUrl: https://saas-dp-api.bluewhale.team/sensor-fusion/lidar-to-camera/cuboid/fisheye
다른 질문이 있으신가요? [email protected]으로 문의주세요.
Updated 11 months ago